![]() CSG
CAD Services
CSG
CAD Services
Submersible ROV
|
|
| Project
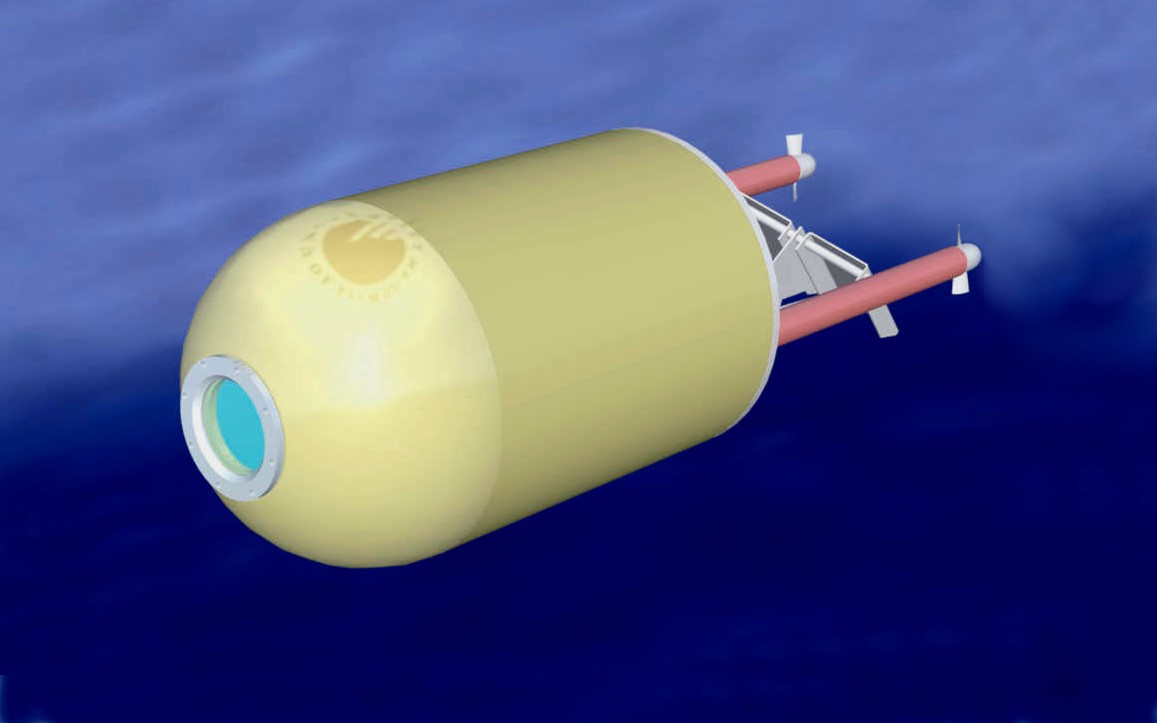
brief: Provide the mechanical design of an experimental submersible ROV (remotely operated vehicle). Project delivered output: The design was developed using 3D parametric solid modelling software, (Pro/ENGINEER). The resultant assembly model was used to analyse the mass distribution of both the components comprising the submersible and the water it would displace. This data was then used to predict the buoyancy and trim of the design. Internal components were then moved around, in the CAD model, until the required buoyancy and trim was achieved, all done prior to manufacture. |
 |
Samples of the 2D drawings created for part manufacturing: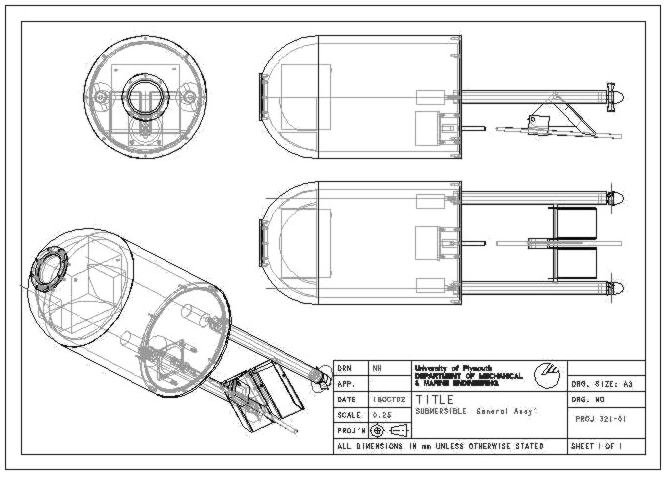 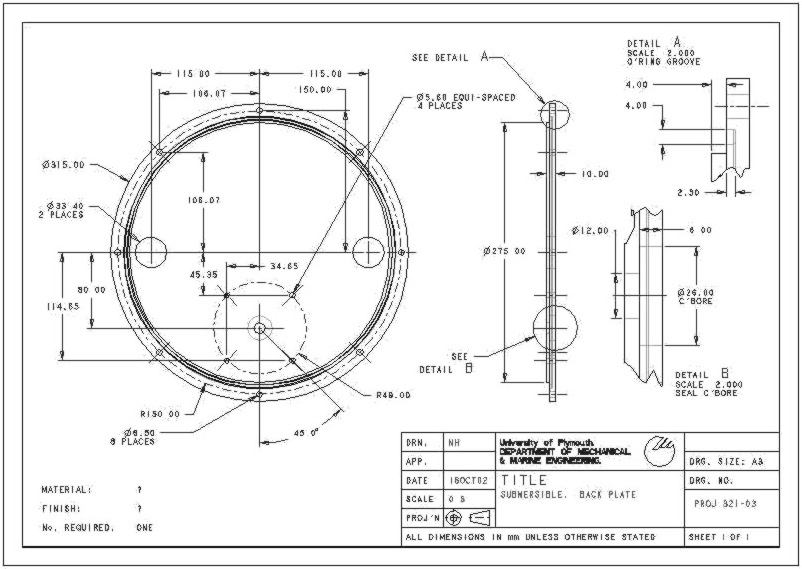 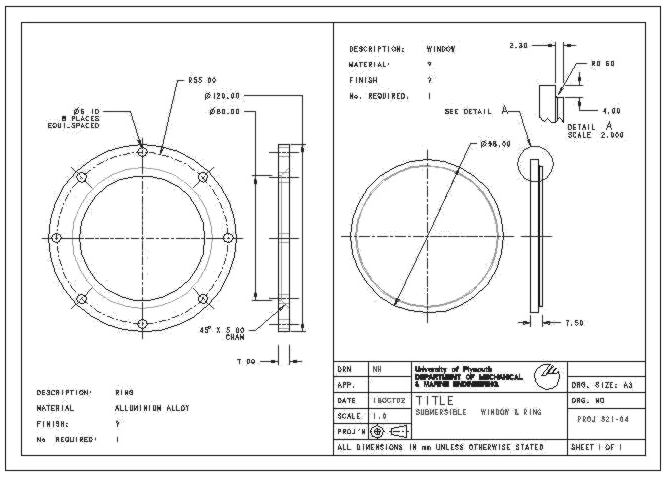  |
|
|
|
|
|
| Home | Design & CAD | Industrial | |
|
|
|
|